Build NeurEco Discrete Dynamic model with GUI
Contents
Build NeurEco Discrete Dynamic model with GUI#
Fill in the Settings tab, the build parameters are explained in the table below:
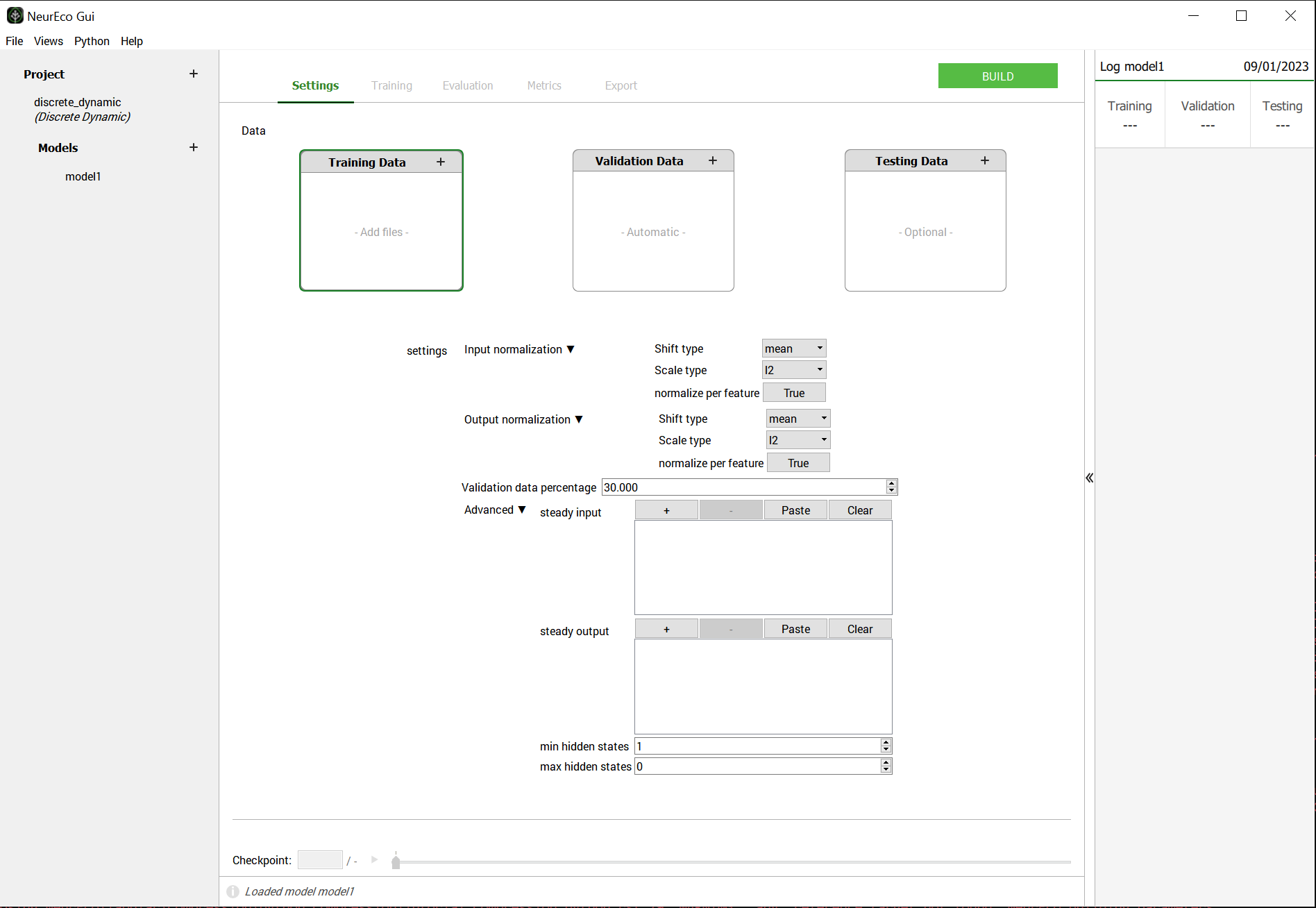
Settings to build a Discrete Dynamic model#
Press Build button
Once the Build started, the Training, Evaluation, Metrics and Export panels become available. The moment the first model is saved to the checkpoint, these panels can be used as usual.
Build parameters#
Name |
Description |
|---|---|
Training Data |
Required. Data used to train a model. Click on Add files and choose paths to the files prepared according to Data preparation for NeurEco Discrete Dynamic with GUI |
Validation Data |
Optional. Data used to validate a model. If not provided, the Validation Data are chosen automatically among the provided samples in Training Data |
Testing Data |
Optional. Data never used during the training process. If provided, allow to monitor the model performance on the test data during the Build. |
Input normalization: Shift type |
Default = mean. Possible values: none, mean. See Data normalization for Discrete Dynamic for more details. |
Input normalization: Scale type |
Default = l2. Possible values: none, l2. See Data normalization for Discrete Dynamic for more details. |
Input normalization: normalize per feature |
Default = True. If True, normalizes each input feature independently from others. See Data normalization for Discrete Dynamic for more details. |
Output normalization: Shift type |
Default = mean. Possible values: none, mean. See Data normalization for Discrete Dynamic for more details. |
Output normalization: Scale type |
Default = l2. Possible values: none, l2. See Data normalization for Discrete Dynamic for more details. |
Output normalization: normalize per feature |
Default = True. If True, normalizes each output feature independently from others. See Data normalization for Discrete Dynamic for more details. |
Validation data percentage |
Default = 30.0. Percentage of the data that NeurEco selects to use as Validation Data. Ignored when Validation Data are provided explicitly. |
Advanced parameters#
Name |
Description |
|---|---|
steady input |
forces the built model to be stable when fed with this input value |
steady output |
stable output value associated to input value of steady input |
min hidden states |
Default = 1, defines starting number of hidden states, it can accelerate the best topology identification process |
max hidden states |
Default = 0, defines the maximum number of hidden states, it can accelerate the best topology identification process. Is not taken into account when set to 0. |
Data normalization for Discrete Dynamic#
Set normalize per feature to True if trying to fit the features of different natures (temperature and pressure for example) and want to give them equivalent importance.
Set normalize per feature to False if trying to fit the features of the same nature (a set of temperatures for example) or a field.
If neither of provided normalization options suits the problem, normalize the data your own way prior to feeding them to NeurEco (and deactivate normalization by setting the scale and shift to none).
A normalization operation for NeurEco is a combination of a \(shift\) and a \(scale\), so that:
Allowed shift methods for NeurEco and their corresponding shifted values are listed in the table below:
Name |
shift value |
|---|---|
none |
\[0\]
|
mean |
\[mean(x)\]
|
Allowed scale methods for NeurEco Tabular and their corresponding scaled values are listed in the table below:
Name |
scale value |
|---|---|
none |
\[1\]
|
l2 |
\[\frac{\left\Vert x\right\Vert }{\sqrt{size \_ of \_ x}}\]
|
Control the size of the NeurEco Discrete Dynamic model during Build#
At any given moment of time the state of the system is represented by a vector, that stores the so-called hidden states of the system. In the state-space representation the hidden states are the state variables.
NeurEco Discrete Dynamic allows imposing the limits on the number of hidden states. When these limits rely on some additional knowledge about the system, it can facilitate the model training and reduce the time of Build.
Imposing the maximum number of hidden states, by setting the parameter max hidden states in Advanced settings, can decrease the size of the constructed model. That is what one is looking for when seeking a trade-off between accuracy and augmenting the embeddability of the model even more.
See Advanced build tutorial for an example of usage.